VIST
A
اخبار مهم
سیاسی
اقتصادی
ورزشی
اجتماعی
فرهنگی
بینالمللی
سلامت
علمی
فناوری
عکس
فیلم
استانها
گرافیک
وبگردی
استخدام
اینفوگرافیک
سبک زندگی
آگهی
اخبار مهم
سیاسی
اقتصادی
ورزشی
اجتماعی
فرهنگی
بینالمللی
سلامت
علمی
آگهی
فناوری
عکس
فیلم
استانها
گرافیک
وبگردی
استخدام
اینفوگرافیک
سبک زندگی
VIST
A
سه شنبه ۷ اسفند ۱۴۰۳ -
25 February 2025
VIST
A
اخبار مهم
سیاسی
اقتصادی
ورزشی
اجتماعی
فرهنگی
بینالمللی
سلامت
علمی
فناوری
عکس
فیلم
استانها
گرافیک
وبگردی
استخدام
اینفوگرافیک
سبک زندگی
آگهی
اخبار مهم
سیاسی
اقتصادی
ورزشی
اجتماعی
فرهنگی
بینالمللی
سلامت
علمی
آگهی
فناوری
عکس
فیلم
استانها
گرافیک
وبگردی
استخدام
اینفوگرافیک
سبک زندگی
VIST
A
طراحی پای ربات
۱۴۰۳/۱۱/۰۸
/ روزنامه هفت صبح
فعالیت ربات ششپای چینی در سرمای منفی ۴۰ درجه
چینیها رباتی پیشرفته طراحی کردهاند که با استفاده از کفشهای ویژه، توانایی تحمل دمای منفی ۴۰ درجه سانتیگراد را دارد و میتواند در محیطهای خشن و یخزده وظایف سنگین را انجام دهد.
چین
علم و فناوری
چین
علم و فناوری
۱۴۰۳/۱۰/۱۷
/ سایت خبرفوری
سُم گوزن شمالی الهامبخش دانشمندان برای طراحی رباتها
دانشمندان با الهام از سُم گوزن شمالی، نوعی پای جدید برای رباتها طراحی کردند که آنها را قادر میسازد روی سطوح گلآلود یا لغزنده حرکت و انرژی کمتری نیز مصرف کنند.
ربات
گوزن
ربات
گوزن
۱۴۰۳/۱۰/۱۶
/ سایت نورنیوز
طراحی پای رباتها با الهام از سُم گوزن
متخصصان رباتیک دانشگاه فناوری تالین (TalTech) در استونی با الهام از طبیعت، پاهای جدیدی برای رباتها طراحی کردند که حرکت آنها را در گلولای یا برف به صورت چشمگیری بهبود میبخشد.
ربات
حرکت ربات در گل و لای
ربات
حرکت ربات در گل و لای
سم گوزن
طراحی پای ربات
۱۴۰۳/۰۶/۳۰
/ خبرگزاری ایسنا
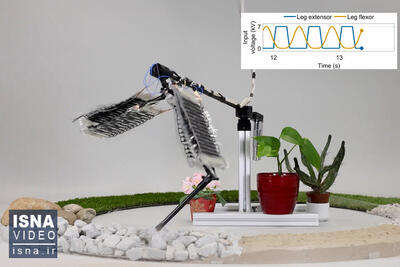
ویدیو/ ساخت نخستین پای رباتیک با «ماهیچههای مصنوعی»
محققان اولین پای رباتیک با «ماهیچههای مصنوعی» را طراحی کردهاند که میتواند بهسرعت روی سطوح مختلف بپرد. ماهیچههای این پای رباتیک در واقع کیسههایی پر از روغن هستند که به ربات اجازه میدهند بیشتر شبیه انسانها حرکت کند.
رباتیک
ماهیچه مصنوعی
رباتیک
ماهیچه مصنوعی
محققان
۱۴۰۳/۰۵/۱۴
/ سایت عصرایران
روباتی برای جمع کردن ته سیگار در سواحل/ هر پای آن یک جاروبرقی است (فیلم)
یک سگ روباتیک ته سیگارها را از سواحل جارو می کند. محققان میگویند این ربات در آینده برای حذف درِ بطری و زبالههای دیگر طراحی خواهد شد.
سگ رباتیک
جاروبرقی
سگ رباتیک
جاروبرقی
ته سیگار
جارو
۱۴۰۳/۰۲/۰۹
/ سایت تابناک
پای رباتها به پمپ بنزین رسید
یک بازوی رباتیک برای سوختگیری چند ثانیهای خودرو در پمپ بنزین، طراحی شده است.
شرکت ملی نفت
بازوی رباتیکی
شرکت ملی نفت
بازوی رباتیکی
ربات
۳۶۵ روز
اخبار گوشی موبایل
کفش ایمنی خارجی
درمان شقاق مقعدی پیکاطب
خرید فالوور اینستاگرام
خرید بازدید اینستاگرام
نمای سرامیک
خرید سرور مجازی
سه شنبه ۷ اسفند ۱۴۰۳ -
25 February 2025
دریافت اخبار بیشتر
۳۶۵ روز
اخبار گوشی موبایل
کفش ایمنی خارجی
درمان شقاق مقعدی پیکاطب
خرید فالوور اینستاگرام
خرید بازدید اینستاگرام
نمای سرامیک
خرید سرور مجازی