شنبه, ۴ اسفند, ۱۴۰۳ / 22 February, 2025
مجله ویستا
اعصاب قطع شده به مدار بر می گردند
اصلاح كاركرد حركتی از بین رفته پس از ضایعه عصبی، قسمت حركتی فوقانی به وسیله تحریك الكتریكی كاركردی (FES: Functional Electrical Stimulation) ، یك روش تازه و جدید نیست. كارآیی این روش در بیماران نیمه فلج بین سالهای ۱۹۶۰ تا ۱۹۸۰، امید تازهای برای درمان این بیماران پدید آورد و تصور میرفت بدن پس از مقدمات نخاعی شود. اما با مشكلاتی در عمل مواجه شد و امروزه فاصله زیادی بین گزارشهای تحقیقاتی و كاربردهای عملی آن در بیماران نیمه فلج وجود دارد.
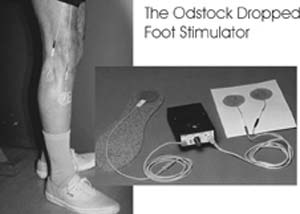
▪ تحریك الكتریكی كاركردی، دارای سه بخش اساسی زیر است:
۱) سیستم كنترل؛ یعنی بخشی كه تعیین میكند كدام عضله باید تحریك شود و سطح تحریك را نیز معین میكند،
۲) تحریك كننده كه وسیلهای است كه تولید قطار پالس الكتریكی مینماید و
۳) الكترودها كه قطار پالس را به نورونهای حركتی منتقل میكند و سبب فعال شدن و انقباض مصنوعی عضلات فلج میشود.
آزمایشها و تحقیقات بالینی FES محدودیتهایی را نشان داده است كه استفاده طولانی مدت یك سیستم FES را غیرممكن میسازد. اما تحقیقات اخیر برای غلبه بر این مشكلات طرحهایی را ارائه كرده است.
این مقاله، در ابتدا مروری بر گذشته سیستمهای FES دارد، سپس در مورد الكترودهایی با طراحیهای خاص بحث میشود و تأثیرات پارامترهای تحریك كننده (مانند شكل موج، شدت و فركانس) و اغتشاشات داخلی مانند خستگی و اسپاسم عضلانی، مورد ارزیابی قرار میگیرد.
● روشهای فعال سازی ساختار عصبی عضلانی
قابلیت الكترود جهت انتقال تحریك مؤثر و دارای قابلیت اطمینان به عضله و فعال كرن آن، برای موفقیت سیستم FES حیاتی است. پیشرفتهای اخیر، امكان ایجاد حركت در افراد فلجی را كه نورونهای حركتی مركزی آنها آسیب دیده است، فراهم میكند. اما این روشها به علت محدودیتهای موجود در فنآوری تحریك، پذیرفته نشده است.
الكترودهای سطحی كه برای تحریك عبوركننده از پوست (TES) به كار میرود، دارای بالشتكهای قابل انعطافی است كه روی پوست قرار میگیرد و برای تزریق جریان به بافت مورد نظر بهكار میرود. این جریان الكتریكی برای فعال كردن سلولهای قابل تحریك، به منظور اهدافی مانند كاهش درد و تحریك عصبی عضلانی بهكار میرود. محققان و طراحان الكترودهای سطحی، برای طراحی، نیاز به بررسی مسیر عبور جریان در بافت دارند. گزارشها نشان میدهد كه به كارگیری FES با الكترود سطحی، دارای محدودیت انتخابپذیری و حداقل جریان لازم بالا برای تحریك عضله است. همچنین الكترودهای سطحی، در شدتهای عادی كه برای تحریك عضله بهكار میرود، منجر به حساسیتهای پوستی ناخوشایند میشود. بنابراین ابزارهای بالینی كه از الكترودهای سطحی استفاده میكند، به آسانی قابل دسترسی است. اما این ابزارها به جایگذاری دقیق الكترودها و تعیین شدت تحریك برای هر جلسه درمان نیاز دارد.
الكترودهای كاشتنی، برای فراهم كردن كنترل قابل اطمینان و تكرارپذیر عضلات فلج بهكار میرود. این الكترودها یا روی سطح عضله قرار میگیرد یا اطراف عصب پیچیده میشود. الكترودهای كاشتنی در بازتوانی حركت باز و بسته شدن دست بهكار میرود. الكترودهای داخل عضله از سیم نازك فلزی تشكیل شده است كه به منظور تحریك نورونهای حركتی در داخل عضله تزریق میشود. الكترودهای زیر جلدی نیز از سیم نازكی تشكیل شده است و نوك آنها برای تحریك وارد عضله میشود. این الكترودها از طریق سیم رابط به كنترلكننده خارجی وصل میشود. به دلیل ویژگیهای مكانیكی، این الكترودها شكننده بوده و تحت استرسهای ناشی از انقباض ماهیچه یا بافت نرم حركت میكند.
اعصاب محیطی توسط جراحیهای كوچك به آسانی قابل دسترس است. الكترودهای اعصاب محیطی به و صورت خارجی و داخلی است. الكترودهای اعصاب محیطی خارجی، بدون آسیب زدن به نخاع، وصل میشود. با اینكه این الكترودها میتواند به طور سطحی ناحیه مورد نظر را تحریك كند، ولی همیشه این پرسش مطرح بوده است كه چگونه آكسونهای داخلی میتواند بدون تحریك آكسونهای سطحی تحریك شود. الكترودهای حلوی (cuff)، از جمله الكترودهای خارجی است كه به دور عصب پیچیده میشود و شامل یك كاف ایزوله با دو یا چند ناحیه فلزی به منظور انتقال جریان است. اخیراً كافهای عصبی دو قطبی برای تحریك اعصاب تنه بهكار میرود و باعث كاهش تجهیزات بهكار رفته جهت تحریك میشود.
همانطور كه قبلاً اشاره شد، برای به كارگیری الكترودهای كاشتنی، محدودیتهایی وجود دارد كه برای حل این مشكلات، الكترود كنترل شده با RF به نام BION طراحی شده است. این الكترود با ابعاد ۲ میلیمتر در ۱۶ میلیمتر، به داخل عضله به وسیله سر سوزن شماره ۱۲، تزریق میشود. سیگنالهای توان و دستورالعمل های كنترلی از میان پوست توسط موج حامل ۲ مگاهرتز منتقل میشود.
● ارزیابی پارامترهای تحریك كننده و اغتشاشات داخلی
با تنظیم الگوی تحریك (شكل موج، شدت، فواصل مابین پالسها و فركانس برای الكترودهای گوناگون) قدرت انقباض عضله ممكن است تغییر كند. بنابراین دستهبندی خروجی محرك اساس اكثر تلاشها برای بهبود سیستمهای كنترلی FES است. در این بخش با مطالعه مكانیزم اساسی الگوهای تحریك و سیگنالهای مزاحم داخلی را مرور خواهیم كرد.
انتخاب شكل موج تحریك، به اثر فیزیولوژیك مورد نظر و نوع الكترود به كار رفته بستگی دارد. الكترودهای كاشتنی بیشتر برای شكل موجهای جریان ثابت به كار میرود و در مورد تحریك ولتاژ ثابت كاربرد كمتری دارد. توجه به پتانسیل تحریك الكتریكی، برای تخریب بافت تحت تأثیر الكترود نیز عامل مهمی در تعیین شكل موج است. نكته دیگر آنكه، تحریك انتخابی فیبرهای عصبی كوچكتر مشكل مهمی در FES است. به همین منظور، تحقیقاتی برای طراحی شكل موجهای تحریك بر اساس تحریك انتخابی دستگاه عصبی انجام شده است.
قطعاً برای بازتوانی فعالیتهای حركتی، كنترل فركانس تحریك نیز لازم است. محققان دریافته اند كه برای سیستمهای FES ساخته شده به منظور ایستادن فرد دارای ضایعه نخاعی، به علت ایزومتریك بودن انقیاضهای عضلانی وی و نیاز به پیوستگی (و نه تناوب) فركانسهای بالا منجر به خستگی سریع عضلانی میشود. در مقایسه با تنظیم یا مدولاسیون فركانس كه تحریك لحظهای پاسخها به هر پالس را تغییر میدهد، شدت تحریك تعداد واحدهای حركتی بیشتری تحریك میشود.
قابل ذكر است در مقابل، تحریك معكوس از نظر فیزیولوژیك منجربه نیروی انقباض با درجه ضعیف شده و عامل حمله سریع خستگی عضلانی است.
مشكل، كمبود روشی است كه بتواند در ابتدا واحدهای حركتی كوچك را تحریك كند و كمكم انواع بزرگتر را نیز شامل شود. این روش باید قابلیت اصلاح همزمان پتانسیل عمل را كه سرعت واحدهای فعال را با استراتژیهای گوناگون (مانند عضلات اسكلتی مختلف) تعیین میكند، داشته باشد. بنابراین روشهای تحریك مختلفی برای مسأله تحریك معكوس عنوان شده است: بلوك آندی، كاتد منفرد، دپلاریزاسیون زیر آستانه پالس مقدماتی.
در سالهای اخیر، بعضی از راهكارها برای مقابله با محدودیتهای فیزیولوژیك كه در سیستمهای FNS (تحریك عصبی عضلانی كاركردی) وجود دارد، بهكار گرفته شده است. این راهكارها شامل طراحی الكترودها، مكان كاشتن آنها و شكل موجهای جدید تحریك كه امكان تحریك فیبرهای عصبی حركتی را در وضعیت فیزیولوژیك مناسب، بالا میبرد، است. به علاوه تغییر درجههای مقاومت خستگی، توسط تحریك اعمالی همزمان، ازطریق چندین الكترود و در فركانسهایی كمتر از فركانس لازم برای فاز انقباض است، قابل حصول شده است.
● پیشرفت كنترل كننده
در دستگاه های FES، كنترلكننده تعدادی از پارامترهای تحریك ورودی را برای دستیابی به خروجی دلخواه تعیین میكند. تحریك كنندههای الكتریكی كه امروزه در كاربردهای بالینی به كار میرود، از یك سیستم كنترلی ساده حلقه باز استفاده میكند كه پارامترهای تحریك آن از پیش تعیین شده است.
در این صورت دو محدودیت اساسی وجود دارد. اول اینكه روشهای كنترلی بالینی نیاز به تنظیم دستی خسته كننده دارد. این روش تولید حركت نامنظم كرده و منجر به خستگی عضلانی سریع میشود. دوم آنكه دستگاههای FES بالینی كه برپایه كنترل حلقه باز عمل میكند، با مشكلات مربوط به حساسیت نسبت به اغتشاشات خارجی و همینطور تغییرات پارامترهای داخلی تحریك رو به رو است. (به طور مثال پدیده خستگی، عادت عضلانی و اسپاسم عضلانی) به صورت طبیعی بعضی از مشكلات شناخته شده این سیستمهای بالینی، منجر به ارائه چندین سیستم كنترلی شده است.
در مطالعات تحریك، این سیستم ها بر اساس مدلهای جانوری و انسانی مورد آزمایش قرار گرفته است. كنترل فیدبكی قابلتی حذف اغتشاشات را فراهم كرده و كنترل كننده های وفقی (adoptive)، روشهای تنظیم را كه برای عضلات گوناگون لازم است، ساده مینماید. اساساً در طراحی سیستمهای كنترلی FNS، مشخصات دینامیك عضلات نیز مورد توجه قرار میگیرد. پس از اعمال پالس تحریك، زمان تأخیری در حدود ۵۰ تا ۱۰۰ میلیثانیه وجود دارد و سپس نیروی انقباضی كه تابعی دنیامیك از پارامترهای قطار پالس تحریك است، ایجاد میشود. مطالعات گوناگونی با استفاده از مدلهایی كه از مدلهای ساده خطی تا مدلهای پیچیده غیرخطی و متغیر با زمان را دربرمیگیرد، این فرآیند دینامیك را نشان داده است.
بدون شك، اگر عضلات برای دورههای طولانی مدت در سطوح بالا فعال شوند، به سرعت خسته خواهند شد. به منظور كاهش خستگی عضلات الگوریتم های كنترلی بهینهای برای بهبود كنترلكننده حلقه باز یا مسیر پیشخوردی FES، ارائه و آزمایش شده است. قطعاً طرحهای حلقه بسته گوناگونی پیشنهاد شده است كه ادعا میشود دستگاههای كنترلی آنها نیاز به تنظیم دستی گسترده را رفع میكند. مهمتر آنكه این مسیرهای پیشخوردی وفقی كارایی را افزایش میدهد و نكته برجسته دیگر، طراحی و ارزیابی نوعی از روشهای كنترلی پسخوردی وفقی توسط بسیاری از گروههای تحقیقاتی است.
این روشها نیاز به مدلهای خاص آزمایشی نداشته و نسبت به كنترلكننده های موجود، برای تحریك مزمن نیاز كمتری به تجهیزات دارد.
● نتیجه گیری
به طور خلاصه، طراحان پروتزهای عصبی به دنبال دستیابی به موارد زیر است:
تولید الگوهای فعالیتی مشابه آنچه در فعالیت فیزیولوژیك طبیعی استفاده میشود، طراحی الكترودها و تعیین مكانهای كاشتنی كه فعالیت انتخابی عضلات را بالا ببرد، روشهایی كه مقاومت در برابر خستگی را افزایش دهد و همینطور شكل موجهای تحریك جدیدی كه امكان تحریك فیبرهای عصبی را در حد طبیعی فیزیولوژیك ایجاد نماید.
این مسأله همواره مورد قبول بوده است كه FES، برای گسترش كاربردهای بالینی نیاز به استراتژیهای كنترلی بهتر دارد. بنابراین امكان مطالعات بیشتری در مورد كنترلكننده وفقی وجود دارد.
از جمله: ارزیابی كارایی در انجام سایر وظایف و انجام آزمایشهای بیشتر در مواردی مانند: زمانی كه خستگی بیشتری تولید میشود، در موقعیتهایی كه تحریك مشترك (costimulation) استفاده میشود و حركاتی كه نیاز به كنترل چند مفصل دارند.
در پایان باید گفت در مطالعات آینده، علاوه بر روش كنترلی FES، مكانیزم اساسی آن نیز نیاز به بررسی دارد.
فریناز زمانی، سمیه ایمانی- دانشجویان مهندسی پزشكی دانشگاه صنعتی امیركبیر
منبع : ماهنامه مهندسی پزشکی و علوم آزمایشگاهی






































































ایران مسعود پزشکیان دولت چهاردهم پزشکیان مجلس شورای اسلامی محمدرضا عارف دولت مجلس کابینه دولت چهاردهم اسماعیل هنیه کابینه پزشکیان محمدجواد ظریف
پیاده روی اربعین تهران عراق پلیس تصادف هواشناسی شهرداری تهران سرقت بازنشستگان قتل آموزش و پرورش دستگیری
ایران خودرو خودرو وام قیمت طلا قیمت دلار قیمت خودرو بانک مرکزی برق بازار خودرو بورس بازار سرمایه قیمت سکه
میراث فرهنگی میدان آزادی سینما رهبر انقلاب بیتا فرهی وزارت فرهنگ و ارشاد اسلامی سینمای ایران تلویزیون کتاب تئاتر موسیقی
وزارت علوم تحقیقات و فناوری آزمون
رژیم صهیونیستی غزه روسیه حماس آمریکا فلسطین جنگ غزه اوکراین حزب الله لبنان دونالد ترامپ طوفان الاقصی ترکیه
پرسپولیس فوتبال ذوب آهن لیگ برتر استقلال لیگ برتر ایران المپیک المپیک 2024 پاریس رئال مادرید لیگ برتر فوتبال ایران مهدی تاج باشگاه پرسپولیس
هوش مصنوعی فناوری سامسونگ ایلان ماسک گوگل تلگرام گوشی ستار هاشمی مریخ روزنامه
فشار خون آلزایمر رژیم غذایی مغز دیابت چاقی افسردگی سلامت پوست