پنجشنبه, ۱۳ اردیبهشت, ۱۴۰۳ / 2 May, 2024
مجله ویستا
روباتیک
روباتیک، علم مطالعه فن آوری مرتبط با طراحی، ساخت و اصول کلی و کاربرد رباتهاست. روباتیک علم و فن آوری ماشینهای قابل برنامه ریزی، با کاربردهای عمومی می باشد.برخلاف تصور افسانه ای عمومی از رباتها به عنوان ماشینهای سیار انسان نما که تقریباً قابلیت انجام هر کاری را دارند، بیشتر دستگاههای روباتیک در مکانهای ثابتی در کارخانه ها بسته شده اند و در فرایند ساخت با کمک کامپیوتر، اعمال قابل انعطاف، ولی محدودی را انجام می دهند چنین دستگاهی حداقل شامل یک کامپیوتر برای نظارت بر اعمال و عملکردهای اسباب انجام دهنده عمل مورد نظر، می باشد. بعضی از رباتها، ماشینهای مکانیکی نسبتاً ساده ای هستند که کارهای اختصاصی مانند جوشکاری و یا رنگ افشانی را انجام می دهند. سایر سیستم های پیچیده تر که بطور همزمان چند کار انجام می دهند، به دستگاههای حسی، برای جمع آوری اطلاعات مورد نیاز برای کنترل کارشان نیاز دارند. حسگرهای یک ربات ممکن است بازخورد حسی ارائه دهند، طوریکه بتوانند اجسام را برداشته و بدون آسیب زدن، در جای مناسب قرار دهند. ربات دیگری ممکن است دارای نوعی دید باشد.، که عیوب کالاهای ساخته شده را تشخیص دهد. بعضی از رباتهای مورد استفاده در ساخت مدارهای الکترونیکی، پس از مکان یابی دیداری علامتهای تثبیت مکان بر روی برد، می توانند اجزا بسیار کوچک را در جای مناسب قرار دهند. ساده ترین شکل ربات های سیار، برای رساندن نامه در ساختمانهای اداری یا جمع آوری و رساندن قطعات در ساخت، دنبال کردن مسیر یک کابل قرار گرفته در زیر خاک یا یک مسیر رنگ شده که هرگاه حسگرهایشان در مسیر، چیزی یا فردی را پیدا کنند متوقف می شوند استفاده می شوند . رباتهای بسیار پیچیده تر در محیط های نامعین تر مانند معادن استفاده می شود.روباتها همانند کامپیوترها قابلیت برنامه ریزی دارند.بسته به نوع برنامه ای که شما به آنها می دهید.کارها و حرکات مختلفی را انجام می دهند.رشته دانشگاهی نیز تحت عنوان روباتیک وجود دارد.که به مسایلی از قبیل سنسورها، مدارات ، فیدبکها، پردازش اطلاعات و بست و توسعه روباتها می پردازد. روباتها انواع مختلفی دارند از قبیل روباتهای شمشیر باز، دنبال کننده خط، کشتی گیر، فوتبالیست و روباتهای خیلی ریز تحت عنوان میکرو روباتها، روباتهای پرنده وغیره نیز وجود دارند.روباتها برای انجام کارهای سخت و دشواری که بعضی مواقع انسان از انجام آنها عاجز است یا انجام آنها برای انسان خطرناک است مورد استفاده قرار می گیرند . مثل روباتهایی که در نیروگاهای هسته ای وجود دارند.
برخی روباتها نیز یکسری کارها را به صورت تکراری با سرعت و دقت بالا انجام می دهند مثل روبات هایی که در کارخانه های خودرو سازی استفاده می شوند. این گونه روبات کارهایی از قبیل جوش دادن بدنه ماشین ، رنگ کردن ماشین را با دقتی بالاتر از انسان بدون خستگی و وقفه انجام می دهند.
● ویژگیهای یک روبات :
▪ یک روبات دارای سه مشخصه زیر است
۱) داری حرکت و پویایی است
۲) قابلیت برنامه ریزی جهت انجام کارهای مختلف را دارد
۳) بعد از اینکه برنامه ریزی شد. قابلیت انجام وظایفش را به صورت خودکار دارد.
ممکن است روزی فرا برسد که روباتها جای انسانها را در انجام کارها بگیرند.حتی بعضی از آنها ممکن است به صورت محافظ شخصی از جان انسانها در مقابل خطرات احتمالی حفاظت کنند.
● آناتومی اندام روباتهای شبیه انسان :
در سال ۱۹۵۰ دانشمندان تصمیم گرفتند شکلی از رباتهای دو پا را درست کنند که از لحاظ فیزیکی شبیه انسان باشند. این گونه روباتها متشکل از دو بازو و دو پا هستند. که دستها و پاها به صورت متقارن و شبیه بدن انسان در سمت راست و چپ ربات قرار گرفته اند. برای انجام چنین کاری آنها می بایست در ابتدا آناتومی بدن خود را می شناختند.آنها معتقد بودند که انسانها طی میلیونها سال تکامل یافته اند تا اینکه امروزه قادرند انواع مختلفی از کارها را انجام دهند. اگر از مردم راجع به روباتهای شبیه انسان سوال کنید. آنها در اولین وهله به یاد فیلم پلیس آهنی می افتند.
● حرکت در روبات :
هنگامیکه شما راجع به مطلبی فکر می کنید و برای آن دنبال پاسخ می گردید می توانید جواب خود را در طبیعت بگیرید. به حیواناتی که اطراف ما هستند و مانند ما می توانند در چهار جهت حرکت کنند دقت کنید، به طور مثال به حرکت فیل توجه کنید، مفاصلی که در پاها وجود دارند سبب حرکت پاها به سمت عقب، جلو، چپ و راست می شوند، هنگامی که این حیوان حرکت می کند وزن خود را بر روی پاهایش تقسیم میکند. بنابراین این امکان را دارد که تعادلش را حفظ کند و بر روی زمین نیافتد. در روباتها نیز همین مسئله وجود دارد اگر یکی از پاهای آن در هوا قرار بگیرد روبات متوقف می شود. و این امکان وجود دارد که بر روی زمین بیافتد. به حرکت مورچه ها دقت کنید. این موجود ۶ پا دارد. در هنگام حرکت به سمت جلو سه پایش را به سمت جلو و سه پای دیگرش را در همان موقعیت به سمت عقب فشار میدهد .دو پا از یک طرف و یک پا از طرف دیگر همواره کار مشترکی را انجام می دهند. و این کار سبب حرکت مورچه به سمت جلو می شود.
حشرات بدلیل داشتن پاهای بیشتر و فرم پاها راحتر از حیوانات چهار پا می توانند تعادل خود را در حرکت حفظ کنند.بهمین دلیل رباتهای شبیه حشرات بیشتر از روباتهایی شبیه سگ و گربه ساخته شده اند.
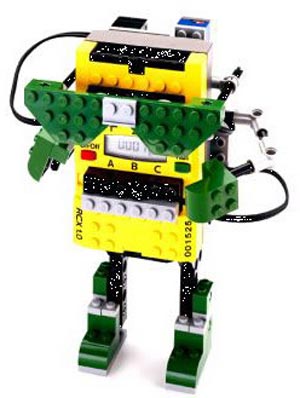
● لگو روبات (lego robot) :
برای شروع به ساخت روبات بهتر است که با لگوها و نحوه اسمبل کردن آنها آشنا شوید. لگوها ایده های خوبی در ساخت روبات به شما می دهند. بسیاری از روباتهایی که ساخته شده اند حشره، حیوان، انسان نیستند.بلکه آنها لگو هستند.شما می توانید بدنه روبات خود را بوسیله لگوها بسازید و مدارات الکترونیک را در آن جاسازی کنید.
بیشتر ماشینهایی که وجود دارند از چهار چرخ تشکیل شده اند. دو چرخ جلویی دارای چرخش زاویه ای هستند و دو چرخ عقبی در جای خود ثابت هستند و تنها میچرخند، حرکت به سمت راست، جلو و عقب را چرخهای جلویی تعیین می کنند. در برخی از ماشینها هر چهار چرخ دارای این وضعیت هستند. از این موارد در ساخت لگو روباتهای شبیه ماشین استفاده می شود. برخی از ماشینهای پیشرفته از راه دور کنترل می شوند(remote control) که این مسئله را براحتی می توان در روباتها بست و توسعه داد.
برای ساخت یک لگو ماشین احتیاج به چهار چرخ پلاستیکی و دو میله تحت عنوان محور دارید. شاید بتوانید این قطعات را براحتی در یک ماشین اسباب بازی پیدا کنید. برخی از طراحان روبات به جای چهار چرخ از سه چرخ استفاده می کنند. در این حالت عموما دو چرخ ثابت وتنها در جای خود می چرخند و تنها یک چرخ دارای حرکت آزاد است. نوع دو چرخ آن نیز وجود دارد. در این حالت هر دو چرخ دارای حرکت آزاد زاویه ای هستند.
برای حل مشکل تعادل روباتها در هنگام چرخش از چهار چرخ استفاده می شود. در هر طرف دو چرخ وجود دارد. که چرخهای هر سمت بوسیله تسمه یا نواری پلاستیکی بهم متصل می شوند.
منبع : پایگاه علمی دانش پژوهان


































































































































نمایندگی زیمنس ایران فروش PLC S71200/300/400/1500 | درایو …
دریافت خدمات پرستاری در منزل
pameranian.com
پیچ و مهره پارس سهند
خرید بلیط هواپیما
ایران نیکا شاکرمی رهبر انقلاب روز معلم معلمان دولت سیزدهم مجلس شورای اسلامی مجلس شهید مطهری حجاب شورای نگهبان قوه قضائیه
تهران هواشناسی زلزله معلم شهرداری تهران سیل قوه قضاییه آموزش و پرورش پلیس سلامت سازمان هواشناسی دستگیری
خودرو قیمت خودرو دولت قیمت دلار ایران خودرو دلار قیمت طلا سایپا بانک مرکزی بازار خودرو کارگران تورم
مشهد رضا عطاران رادیو فضای مجازی تلویزیون سریال سینمای ایران سینما دفاع مقدس تئاتر موسیقی فیلم
دانشگاه علوم پزشکی مکزیک
رژیم صهیونیستی غزه اسرائیل فلسطین جنگ غزه آمریکا نوار غزه روسیه چین حماس عربستان یمن
استقلال پرسپولیس فوتبال سپاهان تراکتور لیگ برتر ایران رئال مادرید بایرن مونیخ باشگاه استقلال لیگ قهرمانان اروپا لیگ برتر باشگاه پرسپولیس
همراه اول دبی واکسن تبلیغات اپل ناسا گوگل وزیر ارتباطات پهپاد
کبد چرب بیماری قلبی کاهش وزن دیابت داروخانه ویتامین طول عمر بارداری