چهارشنبه, ۲۶ دی, ۱۴۰۳ / 15 January, 2025
وقتی مهندسی کنترل ویلچر براند
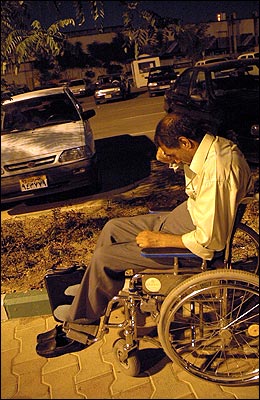
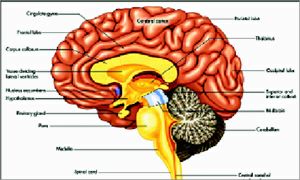
ویلچرها را میتوان رایجترین وسیله توانبخشی برای معلولانی به شمار آورد که از نارسائیهای ناشی از فلج مغزی، آسیب شدید ستونفقرات و نخاع و عدم کارکرد صحیح ماهیچهها رنج میبرند، به شمار آورد. به تنهائی در کشور آمریکا، بیش از ۲۰ هزار نفر از ویلچرهای خودکار (EPWs) بهعنوان اولین و اصلیترین وسیله متحرک خود کمک میگیرند.
گرچه طی ۲۰ سال گذشته، در زمینه طراحی ویلچرهای خودکار پیشرفتهای زیادی صورت گرفت است. ولی از اوایل دهه ۸۰ تاکنون در الگوریتمهای کنترلی که برای هدایت این ویلچرها بهکار میروند، تغییرات زیادی صورت نگرفته است. وضعیت کنونی فنآوری کنترل ویلچرهای خودکار، پویائی و راحتی کافی را برای کاربران این ویلچرها فراهم نمیکند، خصوصاً در مواردی که شرایط محیطی نامساعد باشد، این مشکل بهوضوح احساس میشوند. در این مقاله سعی شده است روی مواردی چون کنترل سرعت، کنترل توقف، کنترل پایداری، کنترل کشش و هدایت ویلچر و پیشرفتهائی که تاکنون حاصل شده است، بررسی اجمالی صورت گیرد.
در دهه ۱۹۵۰، اولین نسل از ویلچرهای الکتریکی به مفهوم تجاری آن وارد بازار شد. در اواسط دهه ۱۹۷۰، با ظهور میکروپروسسورهای تکتراشهای، تحولی در کنترل ویلچرهای خودکار و ارتقاء قابلیت هدایت و ایمنی آنها بهوجود آمد. به منظور تهیه معیاری در خصوص مشخصههای عملکردی و ایمنی ویلچرهای خودکار، مؤسسه استاندارهای ملی آمریکا (ANSI)، به همراه جامعه مهندسی توانبخشی و فنآوریهای کمکی آمریکای شمالی (RESNA)، استانداردی را برای ویلچرهای خودکار تهیه کردند که براساس علائمی چون زاویه عدم پایداری استاتیک، فاصله متوقف شدن در اثر ترمز، مصرف انرژی، رد موانع و دیگر پاسخهای عملکردی به یک بازی آزمایشی خاص، به کاربران امکان میداد تا ویلچر مناسب را برای رفع احتیاجات خود انتخاب کنند (روش تست ویلچر و اسباب مورد نیاز آن در استانداردهای ISO ۷۱۷۶-۱۴ و ISO ۷۱۷۶-۲۱ بهطور خاص توضیح داده شده است).
سیستم پیشران ویلچرهای خودکار معمولاً شامل دو موتور و یک مجموعه راەانداز مکانیکی شامل چرخدندهها، تسمهها و سایر ادواتی است که موتور را با چرخها کوپل میکند. ویلچرها معمولاً از دو موتور DC آهنربای دائم (PMDC)، همراه با دو منبع باتری ۱۲ ولت (که ۲۴ ولت DC را فراهم میکنند)، بهره میبرند. موتورهای PM، دارای پروفایل گشتاور سرعت خطی هستند و این امر کنترل آنها را ساده میکند. یک مبدل DC-DC که قطار پالسدهی با فرکانس بالا را برای هر موتور فراهم میکند و باعث خاموش و روشن شدن متناسب هر موتور میشود، راهاندازی الکتریکی موتورها را برعهده دارد. بدین ترتیب، سرعت و گشتاور تولیدی توسط هر موتور، بهصورت مدولاسیون عرض پالس (PWM)، کنترل میشود. رلههای حالت جامد نیز برای سوئیچ کردن پلاریته ولتاژ به منظور تغییر جهت چرخش موتورها بهکار گرفته میشوند.
میتوان گفت پیگیری سرعت مطلوب، اصلیترین هدف یک سیستم کنترل ویلچر است که هدف آن تنظیم سرعت ویلچر به منظور اجراء صحیح زمانهای وارد شده توسط کاربر و ایجاد راحتی وی است.
برخی ویلچرها به سیستم تشخیص خودکار موانع نیز مجهز هستند. در بررسی اخیری که از ۲۰۰ متخصص امور بالینی صورت گرفته است، اکثر آنها به عدم توانائی و مشکلات کاربران در جهت کنترل ویلچرها اشاره داشتهاند. براساس این تحقیق، بیش از نیمی از کاربران قادر به استفاده از روشهای سنتی کنترل ویلچر نبوده و به استفاده از سیستم هدایت خودکار روی آوردهاند.
سیستم کنترل الکتریکی میتواند برای چرخهای عقب، میانی یا چرخهای جلو مورد استفاده قرار گیرد. اگر چه این سیستمها از نظر دینامیک و سختافزار بهطور قابل ملاحظهای متفاوت هستند، ولی نرمافزارهای کنترلی مشابهی دارند. بیشتر سیستمهای کنترل، به کاربر اجازه میدهد پارامترهائی نظیر حداکثر سرعت و حدود شتابهای رانشی و ترمز را معین کند. این حد از تنظیمات دستی، بیشتر نیازهای یک کاربر ماهر را در غالب شرایط فراهم میکند. کاربران با مهارت کمتر نیز با استفاده از این تنظیمات در سطوح خشک یکنواخت و با موانع کم، قادر به رفع نیازهای خود هستند. با اینحال باید توجه داشت اکثر کاربران در استفاده از ویلچرهای خودکار در محیطهای بیرونی با مشکل مواجه هستند، خصوصاً اینکه این محیطها دارای شرایطی مانند جو نامناسب یا زمین هموار و شیبدار باشند. کاربرانی با معلولیتهای شدید ذهنی و فیزیکی، حتی در استفاده از ویلچرهای خودکار در برخی محیطهای خانگی نیز دچار مشکل میشوند.
درصد بالائی از مشکلات ایجاد شده در ویلچرهای خودکار، مستقیماً به عملکرد سیستمهای کنترل آنها مربوط میشود. در تحقیقی که روی ۱۱۳ کاربر ویلچر خودکار صورت گرفت، ۳۹ درصد آنان به خرابی ادوات ویلچر در حین استفاده اشاره کردند. این ۵۳ خرابی که توسط ۴۴ کاربر گزارش شد، شامل یک خرابی چرخ، ۲۲ اختلال در عملکرد سیستم کنترلی، ده خرابی بدنه، هفت خرابی سیستم راهانداز، ده خرابی زیرپائی، یک محور چرخ عقب و دو مورد خرابیهای متفرقه بود. تعمیر ویلچرهای خودکار معمولاً در محل مقدور نبوده و ویلچر باید به کارخانه سازنده منتقل شود. لذا بعضی از کاربران برای گریز از مشکلات احتمالی در خلال طولانی بودن فرآیند تعمیر، به تعویض ویلچر روی میآورند. هزینه نگهداری ویلچرهای خودکار برای یک دوره ۵ ساله در حدود ۱۰۰۰ دلار است. با توجه به موارد مذکور و توجه به این نکته که درصد بالائی از خرابی ویلچرهای خودکار از ضعف الگوریتم کنترلی ناشی میشود. لزوم توجه بیشتر سازندگان این ویلچرها به بازنگری در سیستم کنترلی، امری بدیهی بهنظر میرسد.
● کنترل سرعت
سرعت، رایجترین کمیتی است که در ویلچرهای خودکار مورد کنترل قرار میگیرد. پس از اینکه کاربر از طریق دسته یا اینترفیسهای دیگر، فرمان لازم را براساس درک خود از موقعیت و سرعت به ویلچر اعمال کرد، کنترل کننده با تنظیم ولتار DC اعمالی به موتور (معمولاً از طریق مدولاسیون پهنای پالس)، سرعت موتور را در جهت رسیدن به سرعت مطلوبی تغییر میدهد. الگوریتمهای کنترلی معمولاً از اصول ردیابی استفاده میکنند. بدین معنیکه کاربر، پروفایلهای خاصی را انتخاب کرده و کنترلکننده، بهرغم تغییر شیب و جنس سطح، سرعت ویلچر را در جهت تعقیب پروفایل مطلوب هدایت میکنند.
از رایجترین روشهای مورد استفاده جهت کنترل سرعت ویلچر، میتوان به روشهای GFD , PID , PI و لیاپانوف اشاره کرد. در روشهای PID , PI با فرض اینکه تابع تبدیل حلقه باز ویلچر مشخص است، بلوکی شامل یک ضریب ثابت، یک انتگرالگیر و یا مشتقگیر (در مورد روش PI از مشتقگیر استفاده نمیشود)، در دیاگرام حلقه بسته سیستم اضافه میشود تا موقعیت قطبهای حلقه بسته را به دلخواه سیستم کنترلی تنظیم کند. ضعف مدل PI و PID در مورد سیستمهای پیچیدهای است که تابع تبدیل سیستم بهطور دقیق مشخص نیست. در مورد این سیستمها باید از روشهای تجربی برای تنظیم ضرایب بهره برد. روش GFD براساس تئوری براساس تئوریهای پیشگیری خاکستری و منطق فازی برای کنترل هوشمند و تطبیقی ویلچرهای خودکار ارائه میشود. از طریق سنسورهای onboard، شامل یک پرگار الکتریکی و یک کدگذار برای هر چرخ، کنترلکننده قادر به برآورد حرکت ویلچر است. الگوریتم GFD سپس پارامترهای مدل را به منظور تقریب دینامیک سیستم مشخص میکند. میتوان گفت ویژگی این الگوریتم، همین تقریب دینامیک سیستم بهرغم تغییر شرایط محیطی است. روش کنترل تطبیقی مدل مرجع لیاپانوف، از قویترین روشهای کنترلی است که تنها با داشتن تقریبی از مرتبه سیستم، میتواند خروجی سیستم را به سمت نمودار مطلوب مورد نظر سوق دهد. از آنجا که در ویلچرهای خودکار، بهدلیل تغییرات شرایط محیطی مانند اصطکاک، شیب، دستانداز، تغییر اندازه، جهت بردار وزن مشخص و فرسایش، اجزاء تابع تبدیل حلقه باز سیستم دائماً در حال تغییر است، نیاز به روشی همانند روش لیاپانوف که حداقل وابستگی را نسبت به تغییرات قطبهای سیستم یا همان ضرایب تابع تبدیل ویلچر داشته باشد، احساس میشود. اساس روش لیاپانوف، انتخاب تابعی از خطای بین خروجی واقعی و خروجی مطلوب است، بهنحوی که بیانگر انرژی سیستم باشد. در ادامه سعی میشود متغیرهای کنترلکننده در جهت عکس تغییرات تابع لیاپانوف تغییر کند. بدین ترتیب سیستم همواره به سمت پائینترین مقدار انرژی و بیشترین پایداری در حرکت است.
پس از وارد شدن جهت و سرعت حرکت از طریق کاربر، در سیستمهای کنترلی ویلچرهای خودکار، کنترلکننده خروجی مطلوب را از نمودار مدل خوانده و براساس جهت و سرعت واقعی که اطلاعات مربوط به آنرا از طریق فیدبک دریافت میکند، قطبهای حلقه بسته سیستم را بهگونهای تغییر میدهد که خروجی در جهت رسیدن به خروجی مطلوب حرکت کند. سیستمهای تطبیقی علاوه بر بلوکهای تشریح شده، دارای بلوکی برای تنظیم پارامترهای کنترلکننده براساس تغییر شرایط محیطی و خصوصیات سیستم است.































































ایران مسعود پزشکیان دولت چهاردهم پزشکیان مجلس شورای اسلامی محمدرضا عارف دولت مجلس کابینه دولت چهاردهم اسماعیل هنیه کابینه پزشکیان محمدجواد ظریف
پیاده روی اربعین تهران عراق پلیس تصادف هواشناسی شهرداری تهران سرقت بازنشستگان قتل آموزش و پرورش دستگیری
ایران خودرو خودرو وام قیمت طلا قیمت دلار قیمت خودرو بانک مرکزی برق بازار خودرو بورس بازار سرمایه قیمت سکه
میراث فرهنگی میدان آزادی سینما رهبر انقلاب بیتا فرهی وزارت فرهنگ و ارشاد اسلامی سینمای ایران تلویزیون کتاب تئاتر موسیقی
وزارت علوم تحقیقات و فناوری آزمون
رژیم صهیونیستی غزه روسیه حماس آمریکا فلسطین جنگ غزه اوکراین حزب الله لبنان دونالد ترامپ طوفان الاقصی ترکیه
پرسپولیس فوتبال ذوب آهن لیگ برتر استقلال لیگ برتر ایران المپیک المپیک 2024 پاریس رئال مادرید لیگ برتر فوتبال ایران مهدی تاج باشگاه پرسپولیس
هوش مصنوعی فناوری سامسونگ ایلان ماسک گوگل تلگرام گوشی ستار هاشمی مریخ روزنامه
فشار خون آلزایمر رژیم غذایی مغز دیابت چاقی افسردگی سلامت پوست